ROS2 Navigation and Mapping
Tools & Technologies
ROS2
Python
This project marked my first experience working with ROS2. The GIF on the left demonstrates the robot performing wall-following behavior, while the one on the right visualizes the mapping of the surrounding environment.
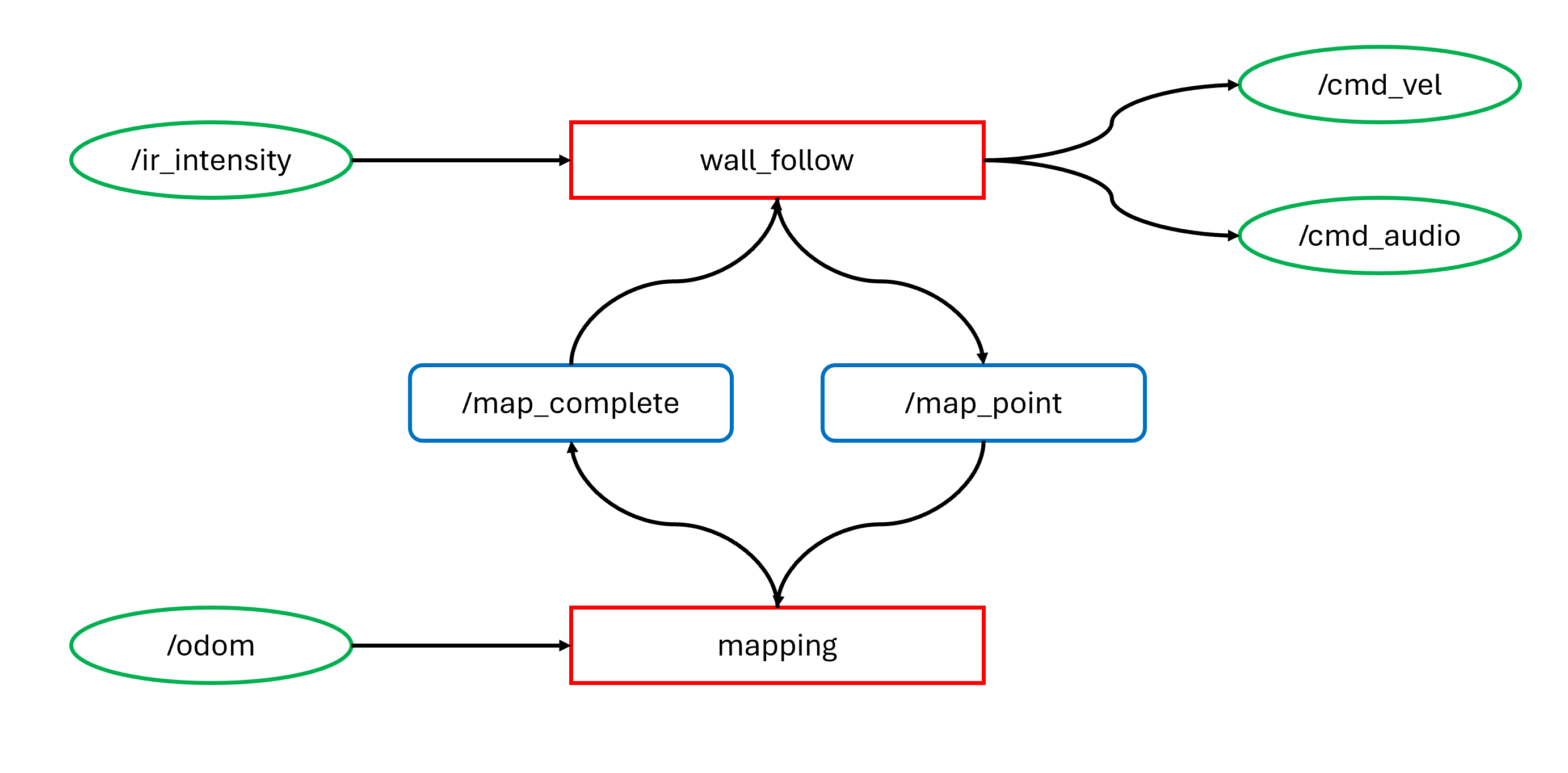
Infrared intensity readings were used as a proxy for estimating distance to nearby walls, enabling the wall_follow node to navigate effectively. At the same time, two services facilitated communication between the mapping and wall-following nodes: one allowed the wall_follow node to request the mapping node to record a new point, while the other enabled the mapping node to signal when mapping was complete, indicating that the robot could stop moving.
The mapping process was based on odometry data.