
5-Bar Linkage
I designed and implemented a simulation of a 5-bar linkage mechanism in MATLAB, utilizing advanced analytical techniques to enhance both accuracy and computational speed. A key aspect of this work was deriving the equations of motion using the method of projections. This approach simplifies the solution process by projecting the constraint forces to zero via the Jacobian matrix, effectively decoupling the dynamic equations from the constraints and streamlining the computation.
By employing a fully analytical solution, the simulation avoids numerical approximations, resulting in faster and more efficient computations. This makes it particularly well-suited for iterative design studies or real-time applications.
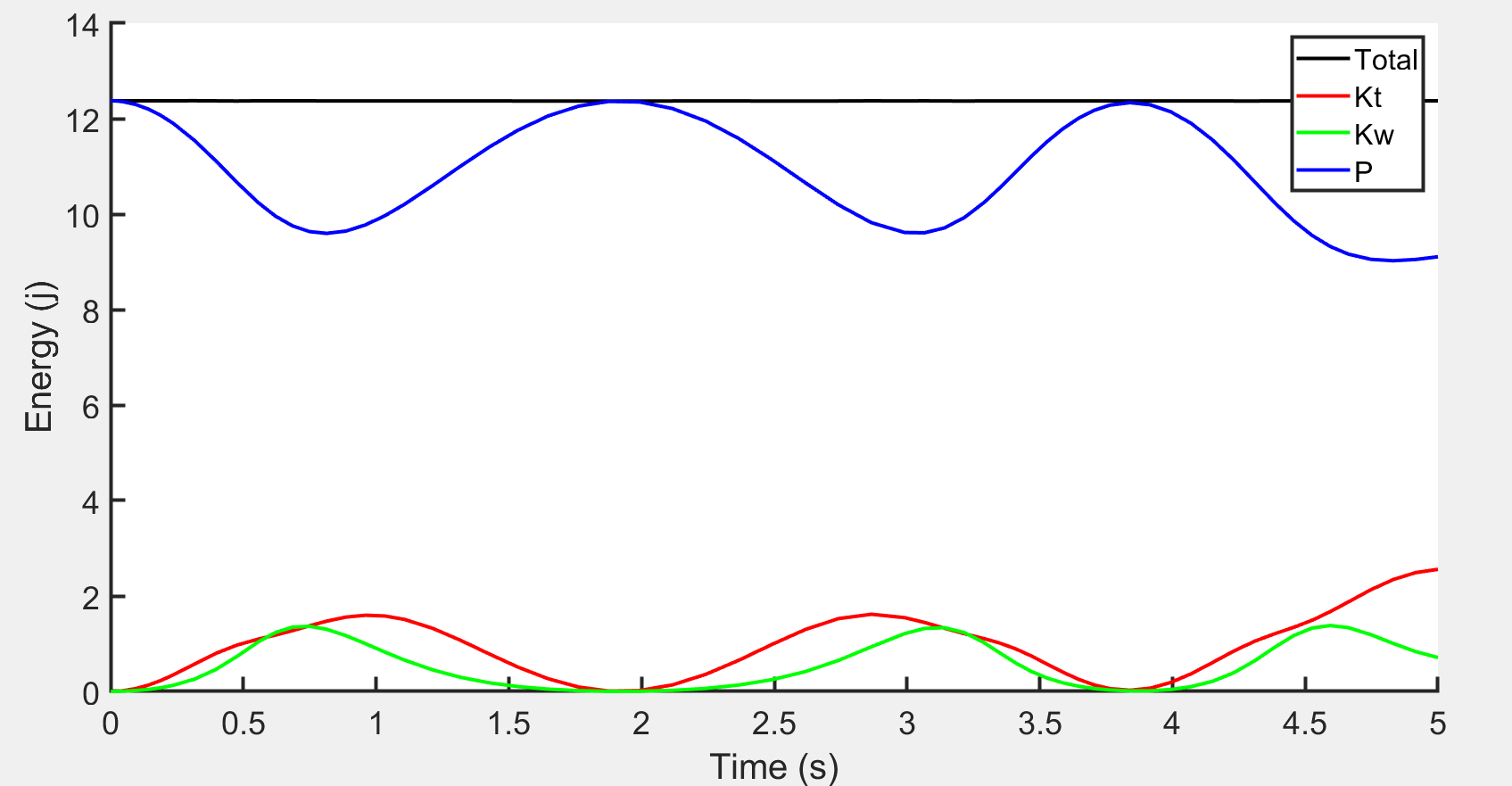
To validate the model, I conducted rigorous energy conservation checks, ensuring that the total energy remained consistent over time. This confirmed the model's adherence to physical laws, demonstrating both its accuracy and stability. It can be seen that while potential energy, rotational kinetic energy, and translational kinetic energy all fluctuate, the total energy in the system remains constant. This is true when the the torque applied to the system is zero and friction is ignored.
This project reflects my ability to integrate advanced mechanical modeling techniques with computational tools, showcasing expertise in dynamic systems and control.